

")

, 3 comparateur: composant du logiciel GUNT, 4 régulateur logiciel, 5 actionneur: moteur
x grandeur réglée: position, y grandeur réglante: tension de commande du moteur, w grandeur de référence: valeurs saisies, e différentiel réglé, G position")

")

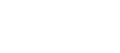
Le RT 060 propose des essais de base sur un système réglé de position. Le système réglé est un chariot qui est déplacé à l’aide d’une courroie crantée. La position représente la grandeur réglée. La position du chariot est saisie par un élément de mesure, qui est ici un codeur rotatif. Le signal de sortie du capteur est transmis au régulateur logiciel. Le signal de sortie du régulateur pilote l’actionneur, qui est ici le moteur. Le chariot est ainsi tiré dans une nouvelle position sur la courroie crantée. Le moteur est automatiquement arrêté lorsque le chariot atteint une des deux positions de fin de course. La position actuelle peut être lue à tout moment directement sur une règle graduée en acier. Le comportement de régulation est affiché directement sous la forme d’intervalles de temps. Un capot de protection transparent permet d’observer sans risque les essais.
Reposant sur une intégration matériel/logiciel (HSI), le logiciel GUNT puissant est un élément central de la série d’appareils. La connexion entre l’appareil d’essai et le PC est assurée par une interface USB (PC externe requis).
L’effet de modifications sur le comportement du système peut être étudié rapidement et facilement à l’aide du logiciel. Un programmateur intégré permet de définir des grandeurs de référence et des intervalles de temps pour réaliser des courbes de grandeurs de référence. D’autres questions relatives à la technique de régulation peuvent être traitées à l’aide de simulations logicielles pour des systèmes réglés jusqu’au second ordre.
Le fait de combiner un système réglé réel très parlant et des simulations d’autres systèmes réglés, dans la série d’appareils RT 010 – RT 060, facilite la compréhension. La préparation des essais ainsi que les simulations logicielles peuvent être effectuées dans le cadre de l’apprentissage à distance. L’observation des essais est possible sur le réseau local, sur un nombre illimité de postes de travail.





")
")




, 3 comparateur: composant du logiciel GUNT, 4 régulateur logiciel, 5 actionneur: moteur
x grandeur réglée: position, y grandeur réglante: tension de commande du moteur, w grandeur de référence: valeurs saisies, e différentiel réglé, G position")
