

")

, 3 comparador: componente del software GUNT, 4 regulador por software, 5 actuador: motor
x variable controlada: posición, y variable manipulada: tensión de control del motor, w variable de referencia: valores introducidos, e diferencia de regulacióne, G posición")

")

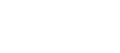
El equipo RT 060 le permite realizar ensayos básicos en un sistema controlado de posición. El sistema controlado se basa en un carro de desplazamiento que se mueve con una correa dentada. La posición representa la variable controlada. En esta caso, la posición del carro se registra mediante un elemento de medición, en este caso, un codificador. La señal de salida del sensor se hace llegar al software regulador. La señal de salida del regulador controla el actuador, en este caso, el motor. Esto hace que el carro se desplace sobre la correa dentada a una nueva posición. El motor se desconecta automáticamente cuando el carro de desplazamiento alcanza una de las dos posiciones finales. La posición actual se puede leer en todo momento en una regla graduada de acero.
El comportamiento de regulación se muestra directamente en forma de curva de tiempo. Los ensayos se pueden visualizar de forma segura a través de una cubierta protectora transparente.
Esta serie de equipos incluye el potente software GUNT en forma de integración de software/hardware (HSI). La conexión entre el equipo de ensayo y el PC tiene lugar a través de una interfaz USB (es necesario disponer de un PC externo).
El software permite analizar de forma rápida y fácil el efecto de las modificaciones sobre el comportamiento del sistema. Su programador integrado permite introducir las variables de referencia y los intervalos de tiempo, para realizar cualquier curva de variables de referencia. Las simulaciones de software permiten abordar otras cuestiones relacionadas con la ingeniería de control para sistemas controlados de hasta segundo orden.
La combinación entre el sistema controlado real y las simulaciones de otros sistemas controlados facilita la comprensión de los conceptos en la serie de equipos RT 010 – RT 060. Los preparativos para el ensayo y las simulaciones por software se pueden realizar a través de Remote Learning. Los ensayos se pueden visualizar en multitud de puestos de trabajo de la red local.





")
")




, 3 comparador: componente del software GUNT, 4 regulador por software, 5 actuador: motor
x variable controlada: posición, y variable manipulada: tensión de control del motor, w variable de referencia: valores introducidos, e diferencia de regulacióne, G posición")
