

")

, 3 comparator: part of the GUNT software, 4 software controller, 5 actuator: motor
x controlled variable: position, y manipulating variable: motor trigger voltage, w reference value: input values, e control deviation, G position")

")

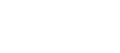
The RT 060 device offers basic experiments on a position controlled system. A moving slide, which is moved by a toothed belt, is used as the controlled system. The position represents the controlled variable. The position of the slide is determined by a measuring element, in this case a rotary encoder. The output signal from the sensor is fed to the software controller. The output signal from the controller controls the actuator, in this case the motor. In this way the slide is pulled into a new position on the toothed belt. The motor is automatically switched off when the moving slide reaches one of the two end positions. The current position can be read directly off a steel scale at any time. The control response is displayed in the form of a time dependency. A transparent protective cover allows the experiments to be observed safely.
The powerful GUNT software for the entire device series – in the form of Hardware/Software Integration (HSI) – is a major component for the entire series. The experimental unit and the PC are connected via a USB interface (external PC required).
The impact that modifications to the system behaviour have can be studied quickly and easily with the help of the software. An integrated programmer allows you to set reference values and time intervals to carry out reference value progressions. Further aspects of control engineering are studied using software simulations for controlled systems up to the 2nd order.
The combination of the clear, real-world controlled system and simulations of other controlled systems in the RT 010 – RT 060 device series aids understanding. Preparations for the experiments, as well as software simulations can be carried out in Remote Learning environments. The experiments can be observed at any number of workstations on the local network.





")
")




, 3 comparator: part of the GUNT software, 4 software controller, 5 actuator: motor
x controlled variable: position, y manipulating variable: motor trigger voltage, w reference value: input values, e control deviation, G position")
